圖形學系列-Ch7 Viewing-閲讀筆記
Contents
從3D空間到2D空間中的映射稱爲viewing transformation。本章將學習如何利用矩陣運算,將已知的3D空間物體映射(可能是平行投影,也可能是透視投影)到2D空間(像平面)中。
7.1 Viewing Transformations
viewing transformations是一系列操作的總稱,這些操作主要完成從3D空間的位置(笛卡爾坐標系下的$(x,y,z)$)到圖像坐標($(u,v)$)的變換。這一系列操作通常可分爲三個變換:
camera transformation或eye transformation:用於調整相機位置和位姿;projection transformation:根據投影類型,將物體從相機空間中映射到$x \in [-1,1]$和$y \in [-1,1]$的區間中,這個區間圖像稱爲unit image。viewport transformation或windowing transformation:將unit image變換成所需的圖像尺寸。
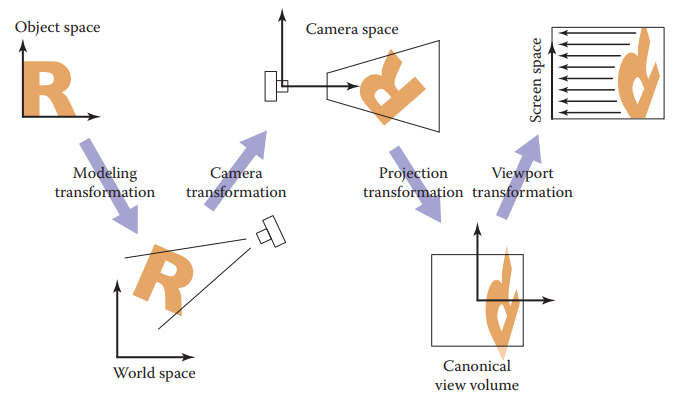
camera transformation將點的空間坐標轉換到相機坐標系下,也稱爲相機空間;projection transformation將點從相機空間中變換到標準視圖躰中,也就是$(x,y,z) \in [-1,1]^3$的立方體中;viewport transformation將標準視圖躰變換到屏幕空間,也就是最後成像。
7.1.1 The Viewport Transformation
假設所有希望看到的物體都在標準視圖躰($(x,y,z) \in [-1,1]^3$)内,相機觀察方向為$-z$,正交于標準視圖躰。縣規定$x = -1$對應圖像左邊界,$x = +1$對應圖像右邊界,$y = -1$對應圖像下邊界,$y = +1$對應圖像上邊界。假設圖像寬高為$n_x$和$n_y$,viewport transformation就是將平面$[-1,1]^2$變換到矩形$[-0.5, n_x - 0.5] \times [-0.5, n_y - 0.5]$中。
這裏忽略了$z$軸坐標的原因是,點在空間中的投影距離,并不影響它在像平面中的位置。所以可得到viewport matrix。
7.1.2 The Orthographic Projection Transformation
通常我們并不只希望獲取標準視圖體内的幾何體,而希望在觀察方向和角度固定(沿$-z$且$+y$正立)情況下,能獲得任意矩形體内的幾何體。我們在viewport matrix右側再乘上一個矩陣來獲得所希望的結果,而不是去修改viewport matrix。
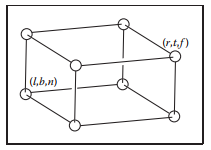
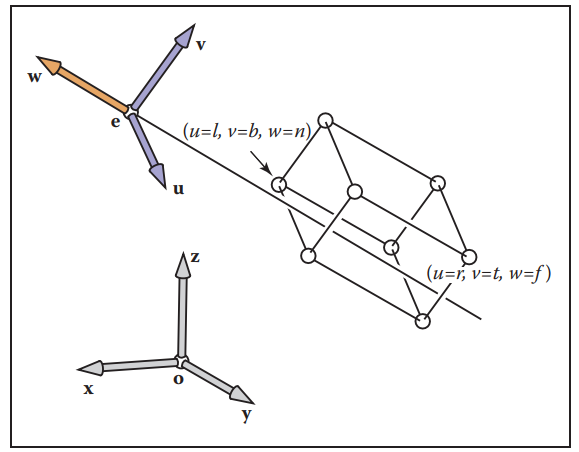
先定義任意矩形體為$[l,r] \times [b,t] \times [f,n]$,如下圖所示:
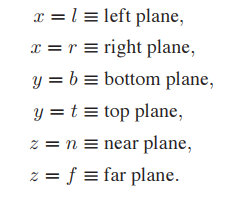
注意,通常觀察方向都是沿著$-z$方向,正立方向都是沿著$+y$軸,對於近平面$n$的值就始終大於遠平面$f$的值,即$n > f$。如下圖所示:
現在只要將orthographic view volume變換到canonical view volume,之後在利用viewport matrix變換即可。
繪製orthographic view volume的3D綫段時,就可以結合矩陣(7.2)和矩陣(7.3)來獲取兩個端點在圖像中的位置坐標。
算法框架如下:
7.1.3 The Camera Transformation
在3D空間中,我們視點位置和觀察角度通常都是任意的,因此,常用以下三個量來定義視點:
- “眼睛”的位置$\mathbf{e}$;
- 視綫方向$\mathbf{g}$;
- 正立方向$\mathbf{t}$
如下圖所示
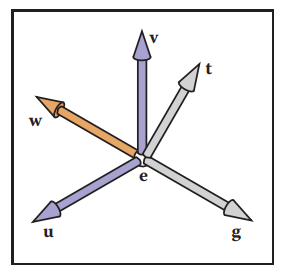
有了這三個信息,就能夠在視點位置構造一個坐標系$\mathbf{uvw}$,也是用於描述相機空間的坐標系。
被觀察物體改用坐標系$\mathbf{uvw}$表示,這樣,只需要變換視點位置$\mathbf{e}$和基坐標$\mathbf{uvw}$,就能將視點和被觀察物體從世界坐標系$\mathbf{o_{xyz}}$變換到相機坐標系$\mathbf{e_{uvw}}$中。
坐標系閒的變換在第六章中做了詳細説明,這裏就不多説,直接上公式:
結合前面的變換,整個viewing transformation的框架如下所示:
總結下,整個viewing transformation過程可以想像成拍照過程,先選好鏡頭和設置相片尺寸(viewport transformation);擺放好相機和被拍攝物體(camera transformation);按下快門(projection transformation)。
7.2 Projective Transformation
射影變換是在相機空間中進行的,通過camera transformation后,視點位置位於相機空間的原點,觀察方向沿著$-z$軸。
在透視投影中,物體在像平面的尺寸,與物體離視點距離的倒數($1/z$)成正比。如下圖:
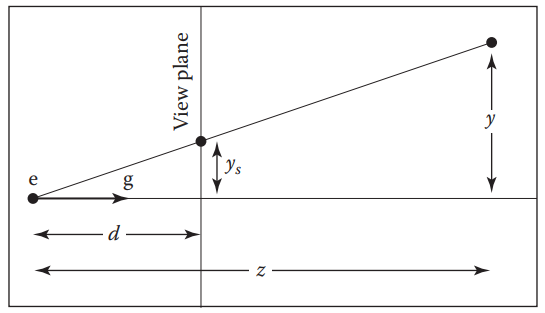
圖中,$d$表示視平面離視點的距離,$y_s$表示物體在視平面上$y$軸上的成像位置。利用相似三角形,很容易得到: $$ y_s = \frac{d}{z}y $$
一般的仿射變換為: $$ x’ = ax + by + cz + d $$
這裏約束齊次坐標系最後一維$w = 1$;若取消這個約束,那麽可以擴展出更多變換,變換形式變化成如下形式: $$ x’ = \frac{ax+by+cz+d}{ex+fy+gz+h} $$
這樣就可獲得關於$x$、$y$和$z$的三個變換函數:
這三個變換函數的唯一約束就是分母是相同的。同樣也可使用矩陣形式表示:
可用這種形式表示的變換都可稱爲射影變換(projective transformation)或單應性。
7.3 Perspective Projection
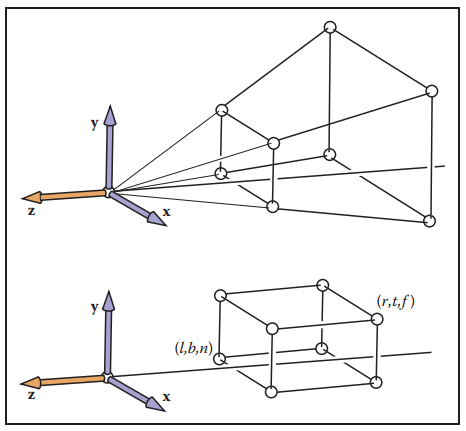
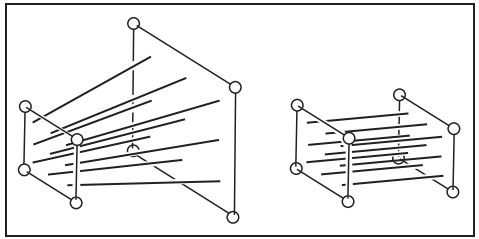
假設,在3D空間中,視點位於原點,觀測方向沿$-z$軸,可是距離由遠近平面限制。 在透視變換中,將近平面作爲像平面,這樣可簡化推導。更簡單的理解是,先將物體透視投影到一個矩形體上,再利用正交投影進行後續操作。如下面兩圖所示:
這裏先回顧圖(7.8),將圖中$y_s$的計算用矩陣可表示爲:
類似的,在3D空間中,$x$和$y$均可按上面的方式處理,得到變換矩陣:
這個矩陣中的第1、2、4行已實現了透視方程,而第3行是與$z$坐標有關,這行的計算值會在之後物體遮擋部分使用到(z-buffer算法)。那第3行的參數是什麽呢?這裏可做如下假設來獲取第3行的參數:
- 齊次坐標係中,坐標$(x,y,z,1)$和$(kx,ky,kz,k)$是表示同一個點;
- 位於近平面上的點,經過投影后仍在近平面上;
- 位於遠平面上的點,經過投影后仍在遠平面上;
根據這以上的假設,可知:
對於近平面上的點變換前後始終是:
與公式(1)對比可知,第3行的計算方式如下:
同理,對於遠平面可得: $$ Af + B = f^2 \tag{3} $$
聯立等式(2)、(3),求解方程組可得:
這樣,就能獲得完整的透視變換矩陣:
對於view volume中任一點進行透視變換可得:
而對於矩陣$\mathbf{P}$的逆變換同樣非常簡單:
至此,將透視變換矩陣和之前的正交投影矩陣結合,就能得到完整的透視投影矩陣:
這樣使用透視投影變換的viewing transformation矩陣可變爲:
算法框架為:
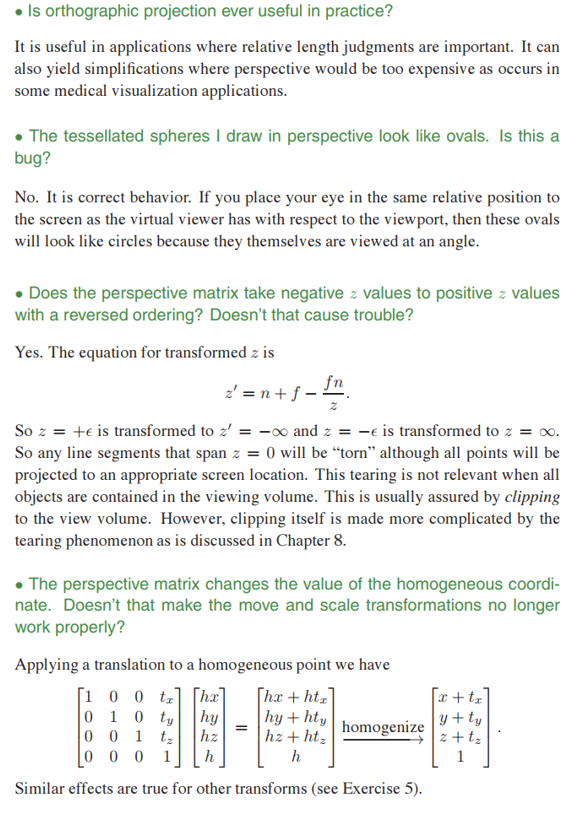
7.4 透視投影變換的一些特點
投影前後,直綫依然是直綫,平面依然是平面;以綫段爲例,假設原綫段為: $$ \mathbf{q} + t(\mathbf{Q}-\mathbf{q}) $$
經過變換矩陣$\mathbf{M}$后: $$ \mathbf{M}\mathbf{q} + t(\mathbf{M}\mathbf{Q}-\mathbf{M}\mathbf{q}) \equiv \mathbf{r} + t(\mathbf{R}-\mathbf{r}) $$
對於3D綫段可變爲:
其中,$f(t) = \frac{w_Rt}{w_r + t(w_R-w_r)}$。這一系列變換過程并未改變點的順序,所以從綫段依然變換爲綫段,平面依然變換爲平面。
7.5 Field-of-View
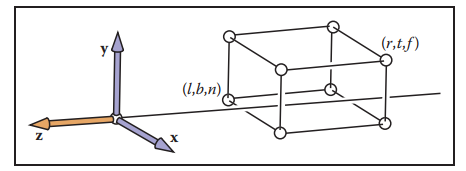
通常,我們會使用$(l,r,b,t)$和$n$來定義可視窗口,其中:
如果成像尺寸(像素)為$n_x \times n_y$,那麽: $$ \frac{n_x}{n_y} = \frac{r}{t} $$
這個比例可稱爲aspect ratio。如果按下圖中所示,在定義$\theta$角度,就能夠簡化可視窗口模型。
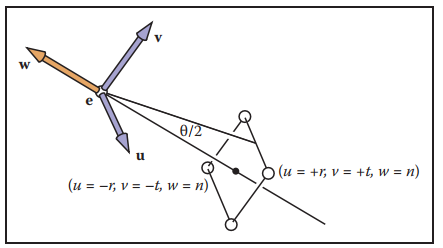
其中: $$ \tan{\frac{\theta}{2}} = \frac{t}{|n|} \tag{4} $$
該$\theta$就稱爲field-of-view,等式(4)中定義了垂直方向的field-of-view,同理也可定義水平方向field-of-view。這樣就能將可視窗口模型簡化爲$(n, \theta_x, \theta_y, ratio_{aspect})$即可。
FQA
聲明
該文檔是本人閲讀書籍《Fundamentals of Computer Graphics, Fourth_Edition》和學習課程《Games-101:现代计算机图形学入门》時整理的閲讀筆記,文檔中所有圖片主要來自本書截圖、Games-101課件截圖和網絡公開圖片。若發現錯誤,歡迎討論指正:uninitmatrix@gmail.com。