《Anatomy of High-Performance Matrix Multiplication》-閲讀筆記
Contents
該論文介紹了實現高性能矩陣乘法的基本準則。
1. Introduction
實現高性能矩陣乘法,需要瞭解在宏觀層面如何對操作進行分層,并在微觀層面仔細設計高性能内核。本文主要解決宏觀問題,即如何設計高性能内核,而不是微觀層面的工程問題。
在論文[Gunnels et al. 2001][1]中,利用分層技術實現了矩陣相乘的運算。這個方法被證明,對於複雜的、多級内存結構而已,能夠最大的分攤相鄰層級閒數據移動的損耗(即效率上的損失)。與該領域其他工作類似,論文[Gunnels et al. 2001]計算矩陣的方式同樣為$C = \tilde{A}B + C$。其中, 矩陣$\tilde{A}_{m_c \times k_c}$是連續存儲在合適的緩存中。但是該論文[Gunnels et al. 2001]中使用的内存層級模型至少有兩方面是不切實際的:
- 假設計算時,矩陣$\tilde{A}$始終在L1級緩存中;
- 忽略了TLB(Translation Look-aside Buffer)的使用。
在相關技術報告[Goto and van de Geijn 2002][2]中指出:
- 浮點運算器的計算效率,即flops(floating point operations),低於浮點數從L2級緩存流入寄存器的效率。這就意味著矩陣$\tilde{A}$能夠存放在L2級緩存中。
- TLB能夠處理的數據量影響矩陣$\tilde{A}$的尺寸。
另外,還發現:
- 事實上,有六個内核應該被考慮構建高性能矩陣乘法模塊,其中之一被認爲遠優於其他。論文[Gunnels et al. 2001]中只確認了其中的三個。
論文結構安排如下:
- Section 2介紹論文中使用的符號標記;
- Section 3介紹矩陣相乘的分層方法;
- Section 4介紹高性能實現的内核;
- Section 5給出最常用的矩陣相乘算法;
- Section 6給出更多細節,這些細節用於知道調整參數,以達到最佳性能;
- Section 7介紹各種架構在最佳優化結果下的性能表現;
- Section 8給出結論性評價。
2. Notation
對於任意$m \times n$矩陣$\mathbf{X}$,都可以將其按行或列拆分成block,其中$m$表示行數,$n$表示列數。
因此,根據矩陣不同的拆分組合,定義其名稱,如下。
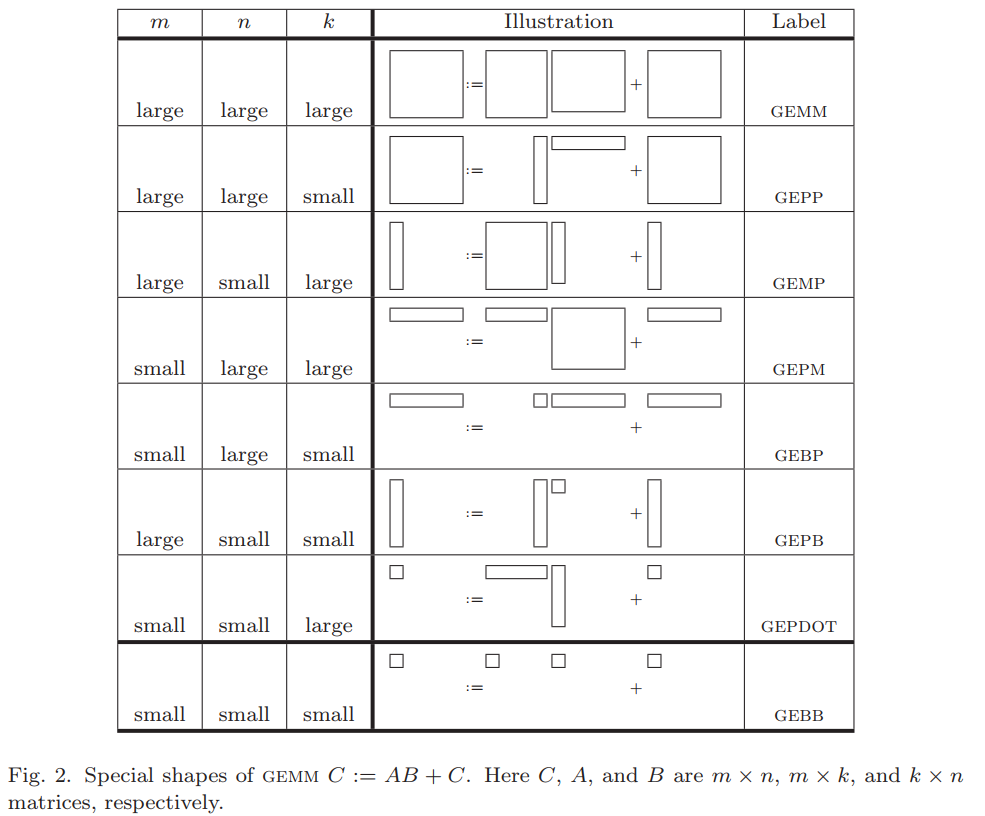
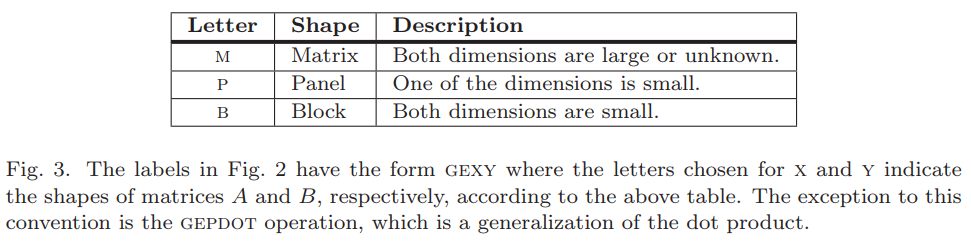
名稱中,不同字母代表的含義如下。
3. A LAYERED APPROACH TO GEMM
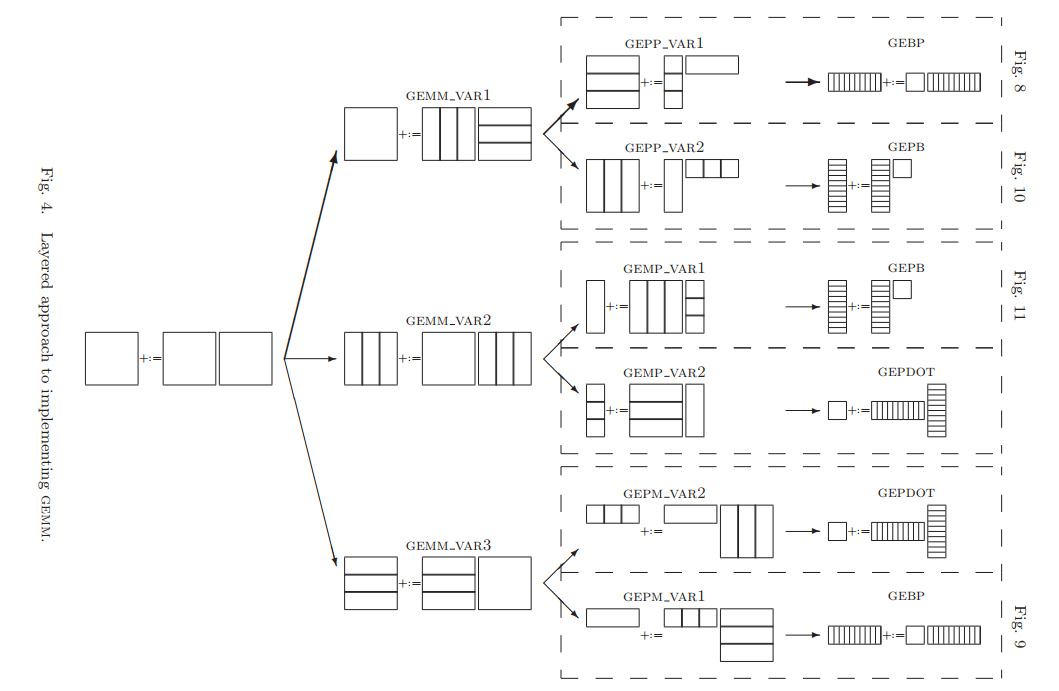
對於任意兩個矩陣相乘,都可以成爲GEMM(即,General Matrix Multiplication)。它們都可以按下面的方式拆分成三种不同的子模块相乘:GEBP、GEPB和GEPDOT。
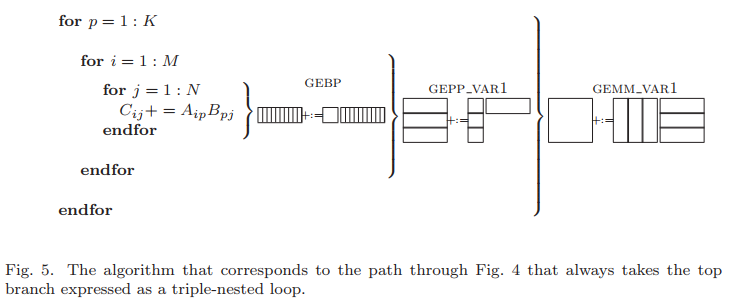
下圖展示了標準三重循環體計算矩陣乘法中,不同層循環對應的子模塊。
這裏再定義子矩陣符號。
其中,
這裏$m_c$、$n_r$和$k_c$子塊尺寸,在之後優化過程中有重要作用。
4. HIGH-PERFORMANCE GEBP, GEPB, AND GEPDOT
既然矩陣乘法能夠拆分成幾個子任務執行,那麽子任務的效率直接影響矩陣乘法的效率。本節就分別對這三種子模塊性能進行分析。
4.1 basic
下來討論數據在存儲介質中移動的效率。下圖為多級存儲介質的抽象模型。
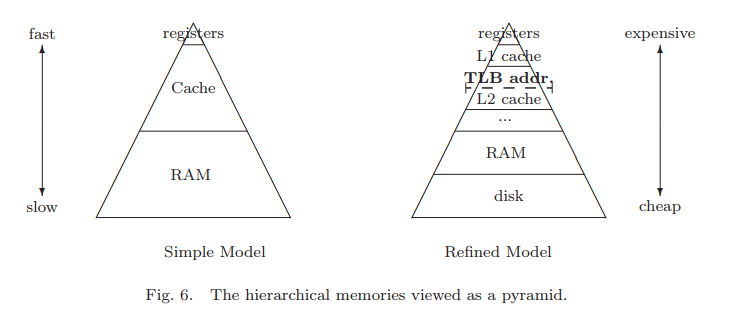
程序在運行過程中,基本都會使用寄存器,這玩意速度快,數量少,造價高;而要處理的數據一般會在内存,也就是RAM,或硬盤中,這兩者之間速度差距非常非常非常大,爲了彌補這兩者閒差距,引入Cache,也就是緩存。雖然緩存造價也高,但相比寄存器,其數量可以做到KB級或是MB級,而且其速度與寄存器相差并不是太大。這樣就能得出一個優化方向,如果處理數據能夠都放在Cache中,那麽效率就能非常高,所以之後所有優化手段就是盡可能將Cache有效利用。
下面先對GEBP子模塊進行討論。
假設,其子矩陣為: $\mathbf{C} \in \mathbb{R}^{m_c \times n}$,$\mathbf{A} \in \mathbb{R}^{m_c \times k_c}$和$\mathbf{B} \in \mathbb{R}^{k_c \times n}$。其中矩陣$\mathbf{B}$及$\mathbf{C}$又可繼續分爲寬度為$n_r$的列向量形式。
此時做如下假設: (a). $m_c$和$k_c$足夠小,可以使子矩陣$\mathbf{A}$和寬度為$n_r$的矩陣$\mathbf{B}_j$和$\mathbf{C}_j$都能夠放到cache中; (b). 如果$\mathbf{A}$、$\mathbf{B}_j$和$\mathbf{C}_j$都放在cache中,則CPU利用率達到峰值; (c). 矩陣$\mathbf{A}$直到不再需要使用時才從cache中移除。
基於這三個假設,得到算法僞代碼如下。
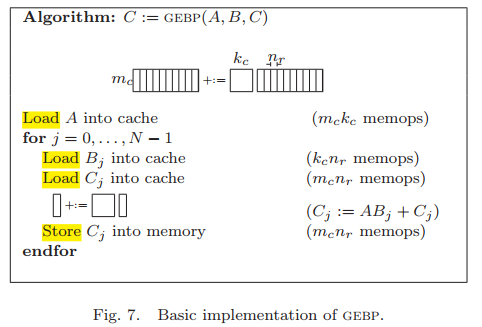
分析,在這個算法中,數據在存儲介質中的移動量memops為:
另外浮點運算量為:$\mathrm{2m_{c}k_{c}n} flops$,兩者比值為:
這個比值的含義是,每單位數據移動開銷可以換來多少浮點運算性能。因此,在前面三個假設(a)~(c)以及盡可能數據盡可能占滿cache的約束下,盡量使下面式子最大化 $$ \frac{2m_ck_c}{2m_c + k_c}\tag{2} $$
對於另外兩種子模塊,也可采用這樣的方式進行分析。

同理可得GEPB的移動量memops為:
GEPB的浮點運算量為:$\mathrm{2mk_{c}n_{c}} flops$,兩者比值為:
GEPDOT的移動量memops為:
GEPDOT的浮點運算量為:$\mathrm{2m_{c}n_{c}k} flops$,兩者比值為:
4.2 Refinements
下面繼續深入探討GEBP的優化。現假設矩陣的存儲方式為“列主序”的方式。
4.2.1 Choosing the cache layer
通過圖6可以知道,存儲器是有等級劃分的!!!在Cache中,又細分爲了L1-cache,L2-cache等,那麽第一個問題就是,子矩陣$\mathbf{A} \in \mathbb{R}^{m_c\times k_c}$ 應該放在哪一級的cache中?
根據等式(2)以及假設條件(a)~(c)可知,$m_c \times k_c$越大,在RAM與Cache之間數據移動的開銷將在計算過程中被分攤的效果越好。這就推出可將矩陣$\mathbf{A}$放到遠離寄存器的Cache中。
如果放在L1-cache中,由於它比較小,所以不太合適;那麽如果放在L2-cache中呢?
令$R_{comp}$表示CPU運算浮點操作的速率;$R_{load}$表示浮點數從L2-cache到寄存器中的速率。假設矩陣$\mathbf{A}$放在L2-cache中,矩陣$\mathbf{B}_j$和$\mathbf{C}_j$放在L1-cache中,忽略L1-cache到寄存器的性能損失。那麽,計算$\mathbf{A}\mathbf{B}_j +\mathbf{C}_j$時,計算量為$2m_ck_cn_r$,數據移動量為$m_ck_c$,即矩陣$\mathbf{A}$從L2-cache到寄存器。因此,兩者效率需滿足下面的關係才能達到優化的目的。
4.2.2 TLB considerations
接下來考慮的是“頁管理系統”。現代模型中使用了虛擬内存的概念,即它的大小不受物理内存大小限制。管理這些虛擬内存的方式是將其劃分成$N$份預設大小的頁,之後有一個表,記錄這些頁與物理内存的映射關係。這個方式的一個問題是,該映射表也是存放在内存中的,從其映射到物理内存也是需要開銷的。爲了剋服這個問題,引入一個更小、轉換效率更高的映射表,TLB(Translation Look-aside Buffer),它保存了經常使用的頁信息。
下面説説TLB miss,儅虛擬内存地址在TLB中查詢不到時,發生TLB miss,此時將查詢條目從page table中移到TLB table中。換而言之,TLB相當於page table的cache。
cache miss和TLB miss的區別在於,cache miss不會導致CPU停頓。可以使用預取數據的方式來一定程度上規避cache miss,而TLB miss不行。
由於現代架構中TLB的存在,現在引入兩個新的假設:
(d). 維度為$m_c,k_c$足夠小,子矩陣$\mathbf{A}$,$n_r$列矩陣$\mathbf{B}_j$以及$n_r$列矩陣$\mathbf{C}_j$都能通過TLB映射到,并且在計算過程中不會發生TLB miss。
(e). 矩陣$\mathbf{A}$一直放在TLB映射表中,直到不需要爲止。
4.2.3 Packing
由於矩陣$\mathbf{A}$是子矩陣,所以在存儲上它是不連續的,這意味著尋址次數會比TLB條目多得多。解決這個問題的方法是Packing,將不連續的子矩陣$\mathbf{A}$打包成連續的矩陣$\tilde{\mathbf{A}}$。這樣,選擇合適的$m_c$、$k_c$參數就能讓$\tilde{\mathbf{A}}$,$\mathbf{B}_j$和$\mathbf{C}_j$都能放入L2-cache中並且都能被TLB查詢到。
Case 1: TLB為約束條件。
假設,總共有$T$條TLB條目,矩陣$\tilde{\mathbf{A}}$,$\mathbf{B}_j$和$\mathbf{C}_j$的TLB條目分別爲$T_{\tilde{A}}$,$T_{B_{j}}$和$T_{C_j}$,那麽它們必須滿足下面條件。
爲什麽會有因子$2$,因爲TLB條碼更新的機制是替換時間最早的未使用條目。那麽這裏$\tilde{\mathbf{A}}$是最先讀取的,接著是$\mathbf{B}_j$和$\mathbf{C}_j$,儅完成$C_j = \tilde{A}B_j + C_j$,讀取新的$\mathbf{B}_{j+1}$和$\mathbf{C}_{j+1}$時,有可能將最早的$\tilde{\mathbf{A}}$條目替換掉,這就違背了假設(e)。因此,我們只需要增加一倍$T_{B_j}$和$T_{C_j}$就能規避這個問題。因爲,$\mathbf{B}_{j+1}$和$\mathbf{C}_{j+1}$不需要替換任何之前條目就能放入TLB表中,但當讀取$\mathbf{B}_{j+2}$和$\mathbf{C}_{j+2}$時,$\mathbf{B}_{j}$和$\mathbf{C}_j$條目成爲最早的未使用條目。
Case 2:L2-cache尺寸為約束條件。
這裏沒有詳細展開。
4.2.4 Accessing data contiguously
不僅數據存放是連續,還要對數據進行重新排列,這樣保證計算過程數據讀取也是連續。
4.2.5 Implementation of GEPB and GEPDOT
这两种方式的分析方式同GEBP。
5. Practical Algorithms
本節對圖4中六個拆分方式的算法進行分析。
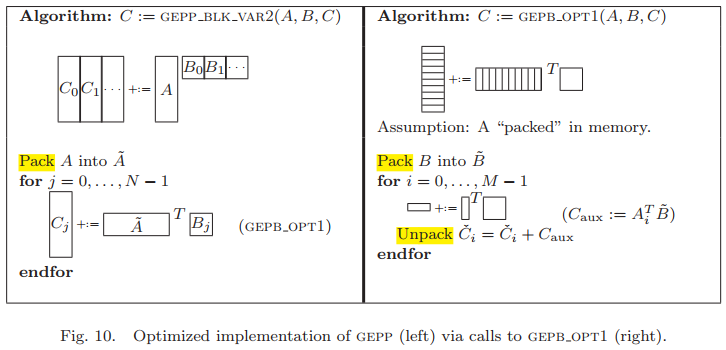
5.1 Implementing GEPP with GEBP
算法僞代碼如下:
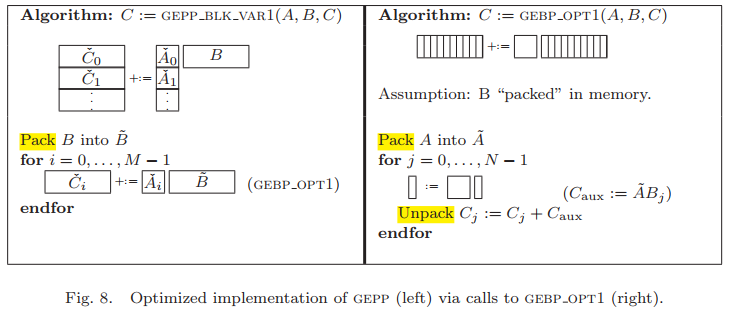
假設TLB縂條目為$T$,根據GEBP_OPT1可知,$\mathbf{B}_j$使用1條TLB條目,$\mathbf{B}_{j+1}$使用1條,$\mathbf{C}_{aux}$使用1條,在Unpacking過程中,需要使用$n_r$條$\mathbf{C}_j$的TLB條目,因此,$T_{\tilde{A}} \leq T-(n_r+3)$。
對$\mathbf{B}$的packing操作,其是内存閒拷貝,開銷與$k_c \times n$成正比,且分攤到$2m \times n \times k_c$次運算中。這個packing操作會破壞TLB之前的内容。
對於$\mathbf{A}$的packing操作,其需要精心設計並重排,使其可保留在L2-cache中,其開銷正比於$m_c \times k_c$,也可分攤到$2m_c \times k_c \times n$次計算中去。這個拷貝工作是相對“廉價”的。
5.2 Implementing GEPM with GEBP
GEBP計算的另一種形式。
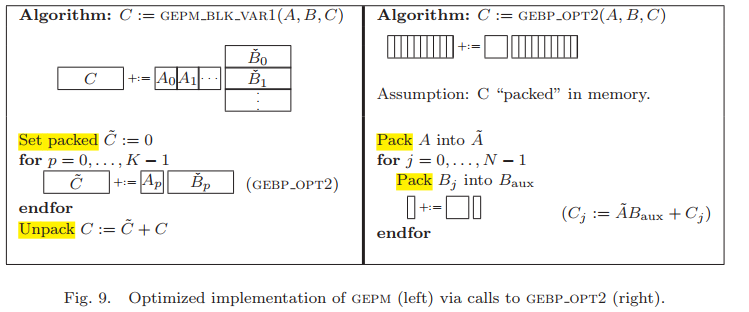
這個形式中,矩陣$\mathbf{C}$需要重複更新,而$\tilde{\mathbf{B}}_p$沒有重複使用,因此其也不需要packing,這樣TLB條目數也可計算出,$n_r$條$\mathbf{B}_j$的,1條$\mathbf{B}_{temp}$,1條$\mathbf{C}_j$以及1條$\mathbf{C}_{j+1}$的,這樣$T_{\tilde{A}} \leq T-(n_r + 3)$。
5.3 Implementing GEPP with GEPB
此時需要將$\mathbf{B}$打包、保留在L2-cache中。同理可知,$T_{\tilde{B}}$需要最大化,而$\mathbf{A}_i$、$\mathbf{A}_{j+1}$和$\mathbf{C}_{aux}$各使用一條TLB條目,因此$T_{\tilde{B}} \leq T - (n_c + 3)$。
5.4 Implementing GEMP with GEPB
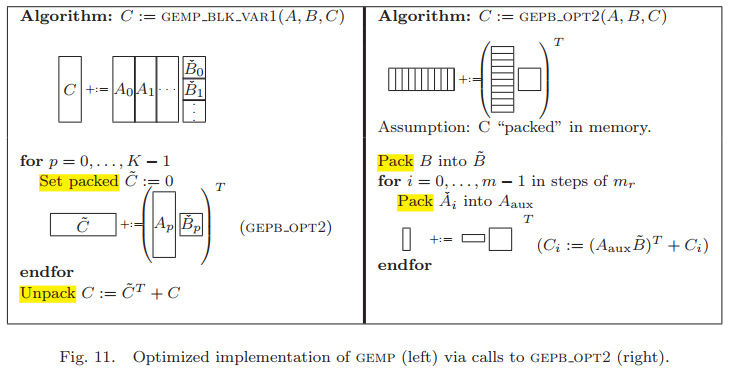
與5.3類似,$T_{\tilde{B}}$需要最大化,而$\mathbf{C}_i$、$\mathbf{C}_{i+1}$和$\mathbf{A}_{temp}$各使用一條TLB條目,因此$T_{\tilde{B}} \leq T - (m_c + 3)$。
5.5 Implementing GEPM and GEMP with GEPDOT
GEPDOT拆分方式不是一個好的優化方向,所以這裏不多做介紹。下面一節中會給出其爲什麽不好的原因。
5.6 Discussion
對於列主序存儲的矩陣,圖8的拆分方式優先考慮。
首先,先關注L2-cache與寄存器之間帶寬問題。基於GEPDOT的方式相較於GEBP或GEPB的方式,需要2倍的帶寬實現從L2-cache和寄存器之間的通信,這也導致其性能不好。
接著對比同是GEBP,但其前置拆分方式不同的情況。比較圖8和圖9,圖8中是打包矩陣$\mathbf{B}$,將矩陣$\mathbf{C}$在内存中傳輸;圖9則是將矩陣$\mathbf{B}$在内存中傳輸,而計算矩陣$\mathbf{C}$時使用緩衝區,最後將緩衝區結果加到矩陣$\mathbf{C}$中。兩者效率上的差別在於,圖8將矩陣$\mathbf{C}$在内存中的移動開銷隱藏,只考慮矩陣$\mathbf{B}$packing的開銷;而圖9則是將矩陣$\mathbf{B}$在内存中的移動開銷隱藏,只考慮矩陣$\mathbf{C}$ unpacking的開銷。但是,矩陣$\mathbf{C}$的unpacking操作相比于packing矩陣$\mathbf{B}$要更複雜,所以圖8要優於圖9。同理可知,圖10相較於圖11的效率更優。
最後對比圖8和圖10,圖8對於列主序存儲更有優勢,而對於行主序則是圖10更有優勢。
6. More Details Yet
以图8中GEBP_OPT1爲例,深入分析寄存器在計算過程中的使用情況,并在之后给出各个参数如何选择。
下圖為該算法對應的矩陣模型。

6.1 Register blocking
考虑其中$C_{aux} = \tilde{A}B_j$,其细分计算模型如下:
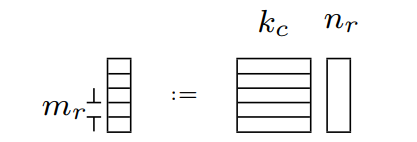
根據之前的分析,以及存儲模型的特性可知,$\tilde{A}$和$B_j$分別位於L2和L1緩存中。這樣對於$C_{aux}$中的子矩陣$m_r \times n_r$,可以利用寄存器進行運算,這就意味著在計算$C_j$時,其子矩陣元素不必常駐與L1緩存甚至是L2緩存中,因爲從寄存器可以將數據移動到存儲模型的任意一層結構中。因此對於這個子矩陣的浮點運算量為$\mathrm{2m_{r}n_{r}k_{c}} \ flops$,其數據移動量為$\mathrm{m_{r}n_{r}} \ memops$。
接著,再討論packing$A$到$\tilde{A}$的操作。對於$\tilde{A}$中每個$m_r \times k_c$子矩陣,其在内存中是連續的,且是按列主序存儲,這保證在計算時,$\tilde{A}$中元素能在連續内存中快速訪問到。
6.2 Choosing $m_r \times n_r$
以下三條$m_r \times n_r$選擇時需要考慮的影響:
- 通常會使用一半的可用寄存器存儲$m_r \times n_r$子矩陣,剩餘寄存器用於預取$\tilde{A}$和$\tilde{B}$的元素;
- 儅$m_r \approx n_r$時,分攤寄存器的數據載入開銷的效果是最佳的;
- 如4.2.1小節中提到,將$\tilde{A}$中元素從L2緩存取到寄存器的時間不能長於前一個元素計算的時間,因此在理想情況下,$n_r \geq \frac{R_{comp}}{2R_{load}}$必須滿足。$R_{comp}$通常單位為$\frac{flops}{cycle}$,$R_{load}$通常是指
Sustained Bandwidth。
這樣寄存器短缺會影響GEBP_OPT1能達到的最佳性能。
6.3 Choosing $k_c$
爲了分攤更新$C_j$中$m_r \times n_r$元素的開銷,$k_c$應該盡可能的大。但是其同樣有約束條件:
- 由於$B_j$會被重複使用,其會常駐L1緩存中,但是集合關聯性和緩存替換策略又限制了$B_j$能夠占用多少L1緩存。這樣在實踐中,$k_cn_r$個浮點數應占用不到L1緩存一半的空間,這樣避免了$B_j$中的元素被$\tilde{A}$和$C_{aux}$驅逐。
- $\tilde{A}$中$m_c \times k_c$個浮點數應占用L2緩存中大部分空間;
經驗選擇是,$k_c$使雙精度浮點數佔頁空間的一半。
6.4 Choosing $m_c$
受到L2緩存的集合關聯性和緩存替換策略的約束,通常選擇$m_c$使$\tilde{A}_{m_c \times k_c}$占據TLB可尋址内存和L2緩存中較小者的一半。
7. Experiments
這部分沒有認真看,都是不同設備上的測試結果和對比,不寫了。
8. Conclusion
作者對影響高性能矩陣乘法的高級問題進行了系統分析,這些見解被整合到一個算法實現中,并在各個平臺中獲得了極高的性能。