圖形學系列-Ch4 Ray Tracing-閲讀筆記
Contents
4.1 - Ray Tracing算法框架
Basic Ray Tracing分为三个部分:
- ray generation: 计算光源位置和光线方向;
- ray intersection: 计算与光路相交的最近的物体;
- shading: 基于ray intersection计算每个点的特性,例如颜色等;
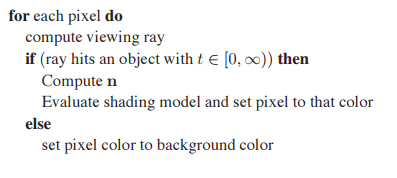
Basic ray tracing program:
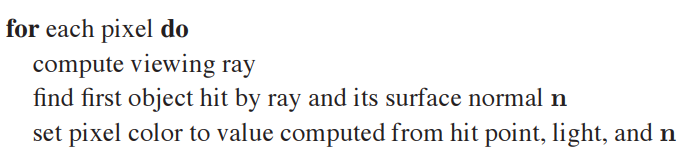
4.2 - 投影
在计算机图形学中,基本都采用线性透视(linear perspective),即从三维空间到二维空间过程中,不改变直线形状——直线依旧是直线。
平行投影 - parallel projection
根据成像平面与投影方向是否垂直又分为:正交投影和斜投影。
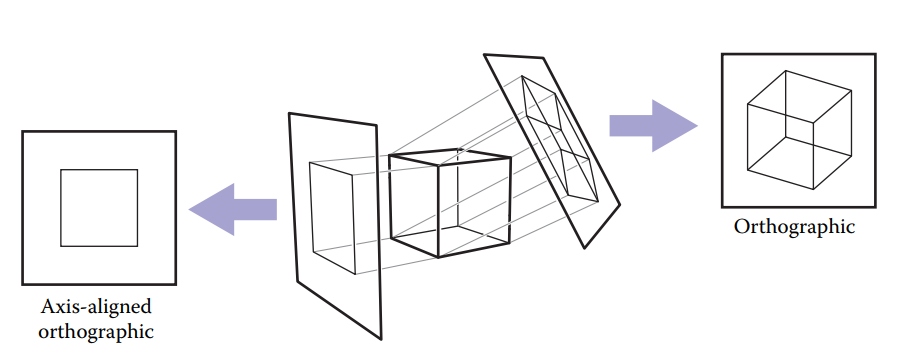
平行投影特点:
- 平行线依旧平行;
- 保留尺寸和形状;
平行投影缺点就是不真实——与现实生活中的现象不吻合。
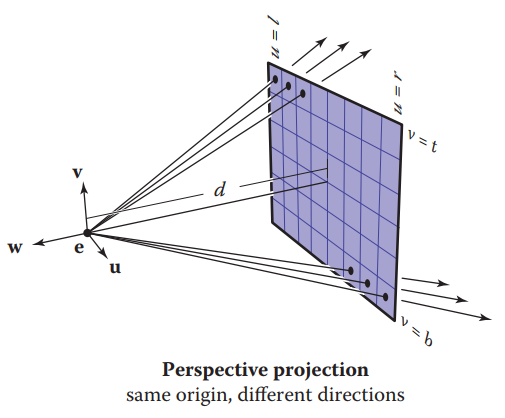
透视投影 - perspective projection
与平行投影类似,根据成像平面与投影方向是否垂直,同样也分为:正交和倾斜的投影;
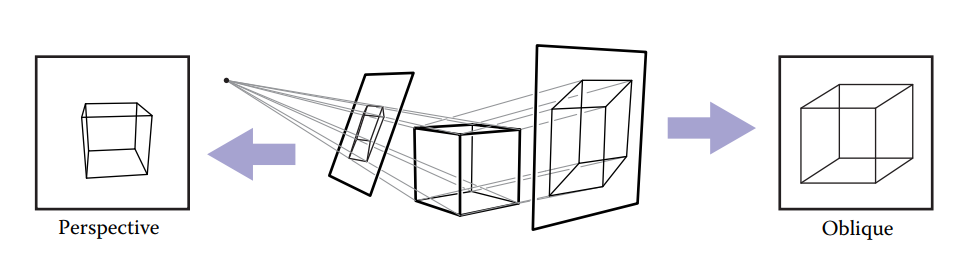
透视投影特点:
- 所有成像点沿投影方向能汇聚到一点——viewpoint;
- 平行线不再平行;
4.3 - 计算Viewing Ray
如何表示Ray
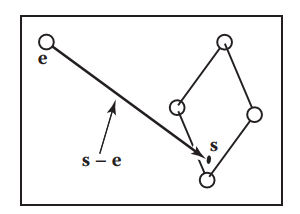
- $\mathbf{e}$是射线源点;
- $\mathbf{s}-\mathbf{e}$是射线方向;
- $\mathbf{p}(0) = \mathbf{e}$,$\mathbf{p}(1) = \mathbf{s}$;
- 如果$t < 0$,则点$\mathbf{p}(t)$在视点的后方;
- $\mathbf{p}(t)$单调递增,即$0<t_1<t_2$,$\mathbf{p}(t_1)$比$\mathbf{p}(t_2)$离视点近;
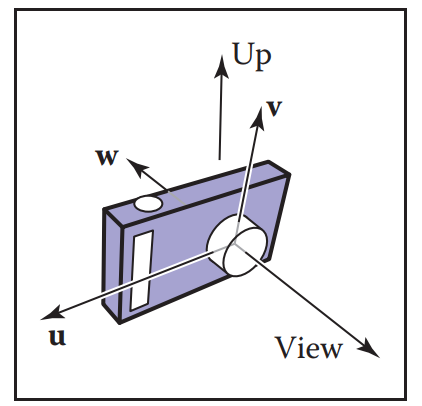
构建相机坐标系(camera frame):
正交视图
假设图像上下左右边界分别为:$t$、$b$、$l$、$r$。通常$l < 0 < r$、$b < 0 < t$。如下图:
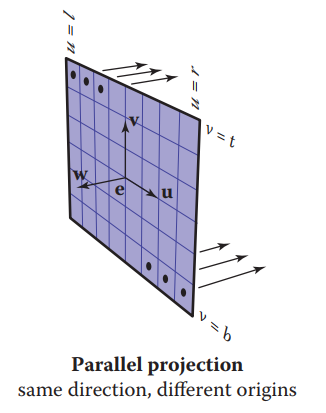
图像上任意点坐标$(u, v)$可以通过这四个变量计算得到: $$ \begin{split} u = l + \frac{(r - l)(i + 0.5)}{n_x} \\[2ex] v = b + \frac{(t-b)(j+0.5)}{n_y} \end{split}\tag{4.1} $$ 其中,$n_x$和$n_y$分别为图像的宽高。
对于平行投影的Ray可以按如下方法计算:
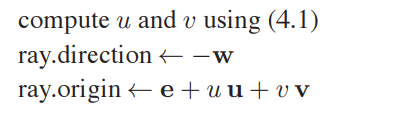
对于斜平行投影,只需要改变$ray.direction = -\mathbf{w}$为斜视图投影方向$ray.direction = \mathbf{d}$即可。计算$\mathbf{u}$和$\mathbf{v}$依然要使用$\mathbf{w}$。
透视视图
对于透视视图,所有的rays都会交于视点。视点与图像平面的距离$d$通常也可称为焦长。
对于透视视图正交的Ray计算,可按如下方式进行:
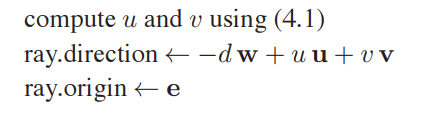
同样,在进行斜投影时,只需将$ray.direction$中的$-d\mathbf{w}$替换为$d\mathbf{d}$即可。
4.4 Ray-Object Intersection
生成Ray方程$\mathbf{e}+t\mathbf{d}$后,需要计算与Ray最先相交的物体在哪里,其中$t > 0$。通常解决这个问题会为$t$设定一个区间$[t_1,t_2]$;若一般化的话,令$t_1 = 0$,$t_2 = +\infty$。
4.4.1 Ray-Sphere相交
假設ray函數表達為 $$ \mathbf{p}(t) = \mathbf{e} + t\mathbf{d} $$ 球面隱式函數為 $$ f(\mathbf{p}) = (x - x_c)^2 + (y - y_c)^2 + (z - z_c)^2 - R^2 = 0 $$ 兩者交點必須滿足以上兩個方程,因此任意一點$\mathbf{p}$滿足以上兩個方程,就説明該點為兩者交點,用向量形式表示為:
根據一元二次方程的解可知: $$ t = \frac{-\mathbf{d}\cdot(\mathbf{e} - \mathbf{c}) \pm \sqrt{(\mathbf{d}\cdot(\mathbf{e} - \mathbf{c}))^2 - (\mathbf{d}\cdot\mathbf{d})((\mathbf{e} - \mathbf{c})\cdot(\mathbf{e} - \mathbf{c}) - R^2)}}{(\mathbf{d}\cdot \mathbf{d})} $$
在點$\mathbf{p}$処的法向量為$\mathbf{n} = 2(\mathbf{p} - \mathbf{c})$,單位法向量為$(\mathbf{p} - \mathbf{c}) / R$。
4.4.2 Ray-Triangle相交
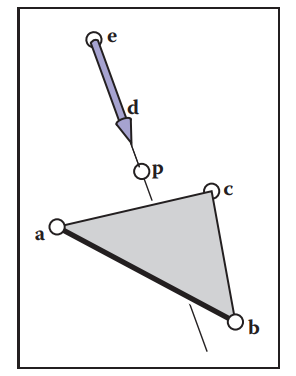
同樣,由ray函數: $$ \mathbf{p}(t) = \mathbf{e} + t\mathbf{d} $$ 和三角形函數: $$ \mathbf{p} = (1 - \beta - \gamma)\mathbf{a} + \beta\mathbf{b} + \gamma\mathbf{c} $$ 可得: $$ \mathbf{e} + t\mathbf{d} = \mathbf{a} + \beta(\mathbf{b} - \mathbf{a}) + \gamma (\mathbf{c} - \mathbf{a}) \tag{4.2} $$ 其中,$\beta > 0, \gamma > 0 , \beta+\gamma < 1$,不然ray與三角形無交點。
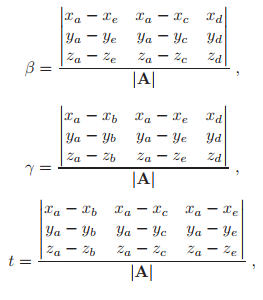
對於等式(4.2),三個未知量$t,\beta, \gamma$,三個方程:
利用Cramer’s Rule解方程組:
可得:
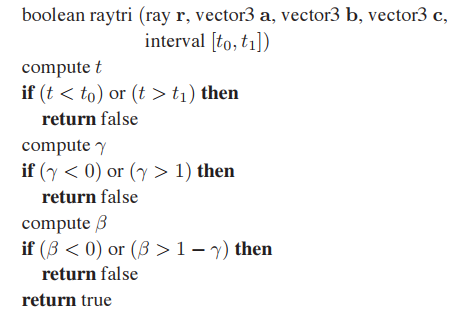
求解ray與三角形相交的僞代碼如下:
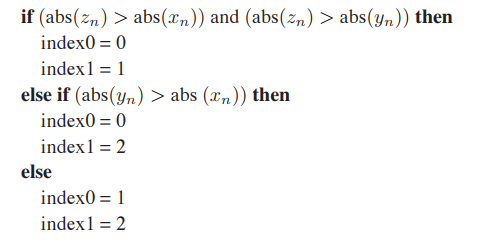
4.4.3 Ray-Polygon相交
給定平面多邊形的$m$個頂點$\mathbf{p}_1$至$\mathbf{p}_m$和表面法向量$\mathbf{n}$,那麽ray與多邊形的交點可以通過以下方式求得: $$ (\mathbf{p} - \mathbf{p}_1)\cdot \mathbf{n} = 0 $$ 將ray方程$\mathbf{p} = \mathbf{e} + t\mathbf{d}$帶入可解得: $$ t = \frac{(\mathbf{p}_1 - \mathbf{e})\cdot \mathbf{n}}{\mathbf{d}\cdot\mathbf{n}} $$ 此時求得的點$\mathbf{p}$不一定在多邊形内,所以還需進一步判斷。 判斷的方式有很多,例如將點$\mathbf{p}$和多邊形都投影到2D平面xy上,然後從點$\mathbf{p}$出發作射綫,統計該射綫與多邊形的交點個數,若爲奇數,則説明點$\mathbf{p}$在多邊形内,反之則不在。以上這個方法存在多邊形投影可能會是一條直綫,通常做法是在xy,yz或zx平面中選取一個最佳的進行投影。選取方式如下:
另外还有其他判断交点$\mathbf{p}$是否在多边形内的方式,例如将多边形分解成多個三角形,然後判斷點$\mathbf{p}$是否在這些三角形内。
4.4.4 與一組物體相交
大多數使用場景都不止一個物體,所以,ray的相交計算通常會獲得距離相機最近的那個物體。下面的僞代碼解釋如何在區間$[t_1,t_2]$内進行選取:
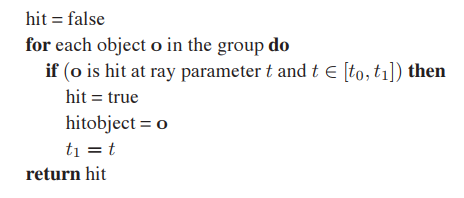
注意每次都會更改$t_1$值,讓其距離$t_0$越來越近,最終獲得$t$的最小值
4.5 Shading
經過上面一系列步驟后,可視表面的像素點就能夠確定,接下來需要利用Shading Model來計算像素值。大多數Shading Model都是描述光纖在物體表面的反射過程,因此定義一個點光源,由反射點指向光源的方向$\mathbf{l}$,觀察方向$\mathbf{v}$,反射點的表面法向量$\mathbf{n}$以及反射表面的各種特性——顔色、光澤度等。 上述所有方向向量均爲單位向量
4.5.1 Lambertian Shading
這個模型非常簡單:來自點光源的能量有多少能夠落在物體表面,與該表面和光纖方向的夾角有關。
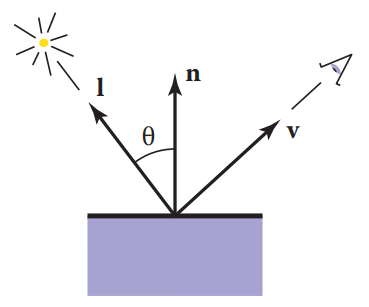
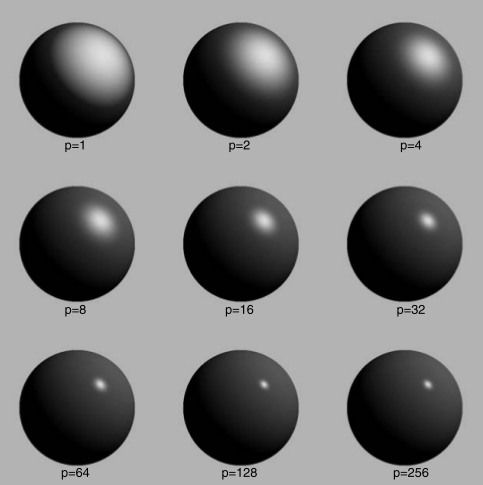
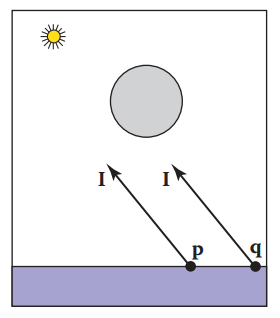
4.5.2 Blinn-Phong Shading
Lambertian Shading模型是與觀察方向無關的,這會導致使用這個模型時,在某些場景下無法準確描述真實情況,例如某些物體表面的鏡面反光。例如下圖:

4.5.3 Ambient Shading
根據上面兩個模型可知:如果物體表面沒有接收到直接光照的話,那麽物體表面是完全黑的。但是實際中并非如此,例如:

上圖中Ambient Lighting位置是背光的,理論上應該是完全黑的,但是這裏依然能夠看清物體表面,説明依然有光纖能夠到達這個位置,這類光纖就被稱爲環境光。通常使用一個常量$I_a$來表示,爲了避免物體表面完全黑暗的情況出現。 $$ L = k_a \cdot I_a + k_d\cdot\mathbf{I}\cdot\max{(0,\mathbf{n}\cdot\mathbf{l})} + k_s\cdot \mathbf{I}\cdot\max{(0,\mathbf{n}\cdot\mathbf{h})}^p $$ 其中$k_a$稱爲surface’s ambient coefficient,$I_a$稱爲ambient light intensity。
4.5.4 多個光源
基於光的可叠加性,多個光源作用時只需要簡單叠加即可; $$ L = k_a\cdot I_a + \sum_{i = 1}^{N}[k_d\cdot\mathbf{I}_i\cdot\max{(0,\mathbf{n}\cdot\mathbf{l}_i)} + k_s\cdot \mathbf{I}_i\cdot\max{(0,\mathbf{n}\cdot\mathbf{h}_i)}^p] $$
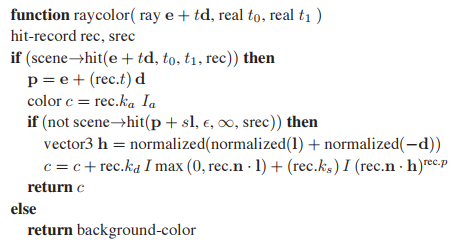
4.6 A Ray-Tracing Program
以上已介紹了如何生成ray、如何計算和ray相交的最近物體以及如何對物體表面著色。這些流程可以按以下框架進行:
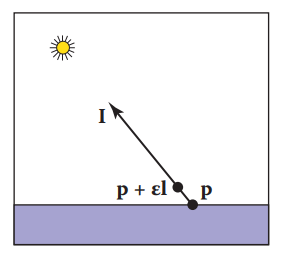
4.7 Shadows
如何判斷著色點是否在陰影中?
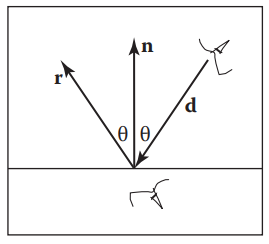
4.8 理想鏡面反射
Frequently Asked Questions
聲明
該文檔是本人閲讀書籍《Fundamentals of Computer Graphics, Fourth_Edition》和學習課程《Games-101:现代计算机图形学入门》時整理的閲讀筆記,文檔中所有圖片主要來自本書截圖、Games-101課件截圖和網絡公開圖片。若發現錯誤,歡迎討論指正:uninitmatrix@gmail.com。